La forma es tan importante como el tamaño: la redondez y la ciencia de la medición
Christopher J. Sangwin
Resumen: La ciencia depende de estándares para la medición. Este artículo describe la evaluación de la forma geométrica, en lugar del tamaño. Consideramos el problema de establecer la desviación de la redondez. En este proceso, examinamos algunas formas geométricas curiosas, incluidas formas no circulares de ancho constante y formas que giran suavemente dentro de triángulos. Esto ha llevado a una reciente reevaluación de los procedimientos estándar de prueba utilizando bloques en V.
Antecedentes
Los instrumentos son los árbitros de la ciencia. Ningún experimento científico puede llevarse a cabo sin una instrumentación confiable y precisa. Para que los experimentos sean repetibles a lo largo del tiempo y por diversos experimentadores, se necesitan estándares que especifiquen unidades científicas básicas. El tiempo, la masa y la longitud son algunas de las primeras cantidades medibles que aprendemos a apreciar. No solo son esenciales para la experimentación en la ciencia, sino también en la tecnología; por ejemplo, el control de calidad también depende de la instrumentación.
Muchas personas entienden la necesidad de estos estándares. Sin embargo, lo que quizás no sea tan evidente es la necesidad de estándares similares para la forma geométrica, no solo para el tamaño.
¿Cómo juzgar una competencia de dibujo de círculos?
Imagina una competencia de dibujo a mano alzada de círculos. Si se presentan dos curvas cerradas convexas bidimensionales, ¿cuál de ellas es la mejor aproximación a un círculo?
Un círculo se define como el conjunto de puntos equidistantes de un centro dado. Conociendo que una forma es un círculo, podemos aplicar sus propiedades geométricas bien conocidas. En particular, podemos bisecar una cuerda con una línea perpendicular y estar seguros de que esta línea pasará por el centro.
Pero, si tenemos una forma desconocida que necesitamos probar, ¿qué punto deberíamos elegir como su 'centro'? Si la forma no es un círculo perfecto, el punto de intersección de las bisectrices perpendiculares de dos cuerdas se desplazará a medida que las cuerdas se muevan. En algunas elipses, estas líneas pueden incluso intersectar fuera de la elipse. Antes de abordar esta cuestión, veremos por qué la respuesta es tan importante.
El desastre del transbordador Challenger
El 28 de enero de 1986, el transbordador espacial Challenger de la NASA se desintegró 73 segundos después de su lanzamiento, causando la muerte de sus siete tripulantes. Una junta tórica en su propulsor derecho falló, permitiendo que una fuga de gas caliente encendiera el tanque de combustible externo.
La Comisión Presidencial sobre el Accidente del Transbordador Espacial Challenger, también conocida como la Comisión Rogers (por el nombre de su presidente), fue formada para investigar el desastre. Sus hallazgos incluyeron lo siguiente:
Los registros del sitio de lanzamiento muestran que los segmentos del motor del cohete sólido derecho fueron ensamblados utilizando procedimientos aprobados. Sin embargo, existían condiciones significativas de falta de redondez entre los dos segmentos unidos en la junta trasera del motor del cohete sólido derecho (la junta que falló).
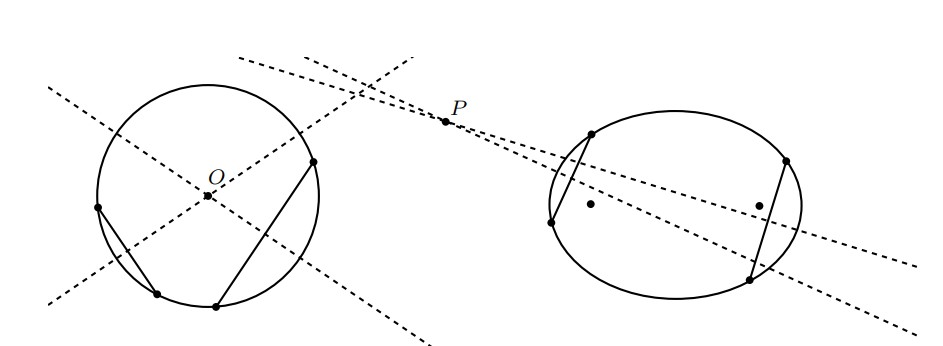
Figura 1: Las bisectrices perpendiculares de las cuerdas se encuentran en el centro de un círculo; en una elipse, no lo hacen.
Richard Feynman y la Comisión Rogers
El físico teórico ganador del Premio Nobel, Richard Feynman, fue miembro de la Comisión Rogers y explicó posteriormente el procedimiento de prueba de la siguiente manera:
"NASA me dio todos los números sobre cuán fuera de redondez podían estar las secciones, así que intenté averiguar cuánto era la compresión resultante y dónde estaba localizada—tal vez la compresión mínima era donde ocurrió la fuga. Las mediciones fueron tomadas a lo largo de los diámetros cada 60 grados. Pero tres diámetros coincidentes no garantizan que las piezas encajen; seis diámetros, o cualquier otro número de diámetros, tampoco lo hacen. [...] Así que los números que me dio la NASA eran inútiles." (Feynman, 1989)
Feynman entrevistó a los técnicos que ensamblaban los motores de los cohetes:
"Tengo una pregunta: cuando miden los tres diámetros y todos coinciden, ¿las secciones realmente encajan? Me parece que podría haber algunas protuberancias en un lado y áreas planas justo enfrente, de modo que los tres diámetros coincidan, pero las secciones no encajen realmente.""¡Sí, sí!", dijeron. "Obtenemos protuberancias como esa. Las llamamos ‘mamelones’. [...] "Nosotros los vemos todo el tiempo", continuaron. "¡Hemos intentado decírselo al supervisor, pero nunca llegamos a ninguna parte!" (Feynman, 1989)
La geometría de la redondez y las pruebas de desviaciones de la redondez jugaron un papel significativo en este desastre. Pero, ¿qué quiso decir Feynman cuando afirmó que "tres diámetros coincidentes no garantizan que las cosas encajen; seis diámetros, o cualquier otro número de diámetros, tampoco lo hacen"?

Figura 2: Experimento con monedas de 50p atrapadas entre reglas paralelas.
Antes de continuar, puedes realizar el siguiente experimento. Toma dos monedas de 50 peniques y dos bordes rectos. Coloca las monedas sobre una superficie plana y atrápalas entre dos reglas paralelas. Para diferentes orientaciones de las monedas de 50p, ¿cuál es la distancia entre las reglas?
Nota del editor: Este artículo es parte de las conferencias de ciencia de frontera presentadas en la Conferencia Anual de la Asociación de Educación Científica (ASE) en Birmingham en enero de 2014. Estas conferencias están presentes en cada evento anual y suelen ser presentadas por miembros del personal de la universidad anfitriona para introducir a los profesores en aspectos científicos más allá del nivel escolar. En este caso, se explora un vínculo entre la ingeniería, la física y la matemática pura. Cuando se presentó esta conferencia, el autor se había trasladado recientemente de la Universidad de Birmingham a un nuevo puesto en la Universidad de Loughborough.
Diámetro y Ancho
Imagina que tenemos un calibrador diseñado para medir el ancho de una forma. El ancho de un cuadrado unitario varía según la orientación. Si tenemos un círculo, el ancho es constante. La oración anterior tiene la forma "si A entonces B". Usando nuestros calibradores, medimos el ancho de una figura dada en todas las direcciones y encontramos que no varía; es decir, el ancho es constante. Si el ancho es constante, ¿tenemos un círculo? Esta afirmación tiene la forma "si B entonces A".
Observa la relación entre estas dos afirmaciones: la hipótesis y la conclusión están invertidas. Los matemáticos describen estas afirmaciones como el converso de la otra. Se confunden fácilmente y, lo más importante, son independientes entre sí. Sabemos que la primera es cierta: todos los círculos tienen un ancho constante, es simplemente el diámetro. ¿Qué podemos concluir sobre la segunda?
Toma, por ejemplo, una moneda de 50p. Mide su diámetro en todas las direcciones y puede sorprenderte descubrir que el diámetro, dentro de la precisión disponible en los calibradores de banco, no parece variar. Atrapando dos o más monedas entre reglas paralelas de 30 cm es un experimento cualitativo muy efectivo. Sin embargo, la moneda de 50p no es circular en absoluto. En realidad, la geometría subyacente al diseño de esta moneda garantiza que su ancho sea constante. ¿Cómo puede ocurrir esto?
La forma no circular más simple de ancho constante es un triángulo equilátero con arcos circulares centrados en cada vértice y pasando por los otros dos. Se conoce como el rotor de Reuleaux, en honor a Franz Reuleaux (1829–1905), y se muestra en la Figura 3. Es fácil ver que el rotor de Reuleaux también tiene un ancho constante. Una tangente a uno de los arcos circulares siempre estará a una distancia constante de una línea paralela que pase por el centro de este arco.
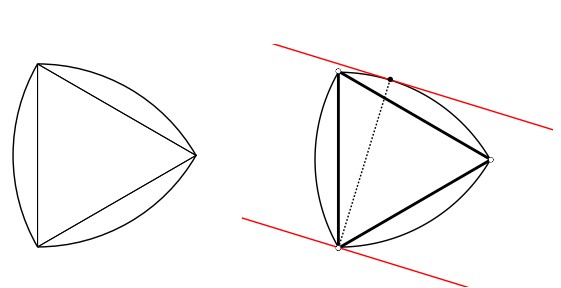
Figura 3: El rotor de Reuleaux, un ejemplo de forma de ancho constante.
Esta forma no es única; de hecho, existen muchas formas de ‘ancho constante’. En este artículo, definimos una forma como redonda si tiene una sección transversal circular. Utilizar la palabra "redonda" nos permite hablar tanto de formas bidimensionales como tridimensionales. Una vez más, el rotor de Reuleaux es fácil de fabricar, y dos rotores pueden atraparse entre bordes rectos paralelos o convertirse en un rodillo mediante la creación de un eje.
Sin embargo, ten en cuenta que el eje necesariamente se moverá hacia arriba y hacia abajo. Si el eje también permanece a una altura constante, entonces debemos tener una rueda circular. Las formas no circulares de ancho constante pueden usarse como rodillos, pero no como ruedas. La diferencia entre ambas es una idea clave. Al medir el ancho, no elegimos un centro. En su lugar, confiamos en una propiedad del círculo, no en su característica definitoria. Las formas de ancho constante parecen redondas si confundimos el ancho constante con la redondez. El procedimiento descrito por Feynman es exactamente esto: medir el diámetro en varias orientaciones.
Para muchas aplicaciones de ingeniería, es esencial establecer y cuantificar la desviación de la redondez, ya que muchos dispositivos dependen de la rotación o de un ajuste preciso. Existen diversas familias de formas bidimensionales de ancho constante. En cada una, hay un espectro continuo con el rotor de Reuleaux en un extremo y el círculo en el otro. Ya sea aumentando el número de lados en un polígono, o cambiando continuamente el radio de un arco o su ángulo de construcción, se puede crear este espectro. Estas formas se ilustran en la Figura 4, y todas pueden dibujarse fácilmente con una regla y un compás.
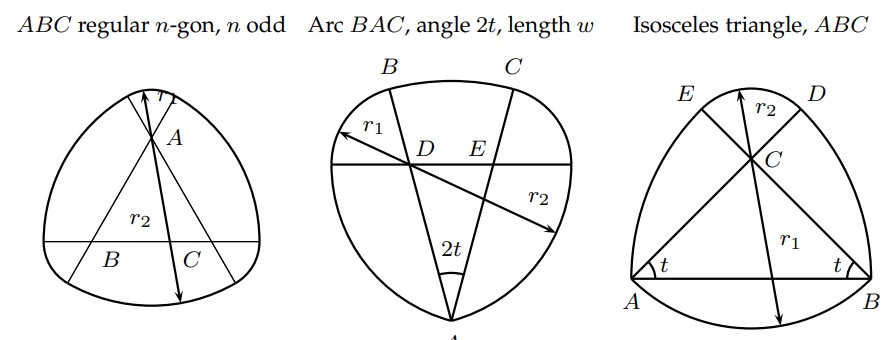
Figura 4: Varias familias de formas de ancho constante.
Las formas de ancho constante pueden crearse de varias maneras, y no es necesario utilizar arcos circulares. Algunas de estas se describen en detalle en Bryant y Sangwin (2008).
También podemos crear objetos sólidos con ancho constante. El más simple de estos se obtiene rotando el rotor de Reuleaux alrededor de un eje de simetría. De hecho, cualquiera de las formas de ancho constante en la Figura 4 puede girarse alrededor de su eje de simetría.

Figura 5: Selección de sólidos de ancho constante creados por John Bryant.
La geometría simple de estas formas las hace ideales para proyectos de impresión 3D. Los sólidos de ancho constante no necesitan un eje de simetría rotacional. El más conocido se basa en el tetraedro regular y a veces se le llama tetraedro de Meissner (Chakerian y Groemer, 1983).
Aplicaciones
Estas sorprendentes formas tienen muchas aplicaciones útiles más allá de las monedas decorativas, como la de 50p. La característica esencial para las aplicaciones es que tenemos una forma que rota suavemente dentro de otra. Dos ejemplos de estos pares de formas simples son dos círculos de idéntico tamaño que pueden rotar juntos y formar un rodamiento mecánico, y un círculo que rota suavemente dentro de un cuadrado.
Una de las aplicaciones más notables es la perforación de un agujero cuadrado. Esto se puede lograr de varias maneras, una de las cuales es utilizando el rotor de Reuleaux y eliminando partes para crear caras de corte que permitan la salida del material extraído. Una animación maravillosa de este proceso está disponible en línea en este enlace. Sin embargo, este método no llega exactamente a las esquinas del cuadrado, eliminando solo alrededor del 98% del material. Un taladro que puede cortar un cuadrado perfecto se basa en una forma de ancho constante derivada de un triángulo isósceles rectángulo.
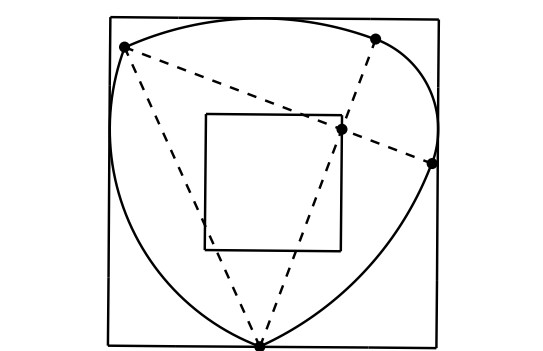
Figura 6: Este rotor forma la base de un taladro que corta agujeros cuadrados.
Este concepto se muestra en la Figura 6, donde se utiliza un caso con t=45°. Si una leva con esta forma se aloja en un agujero cuadrado de longitud de lado w, entonces parte del cuadrante de D a E siempre debe tocar uno de los lados. Por lo tanto, la trayectoria del punto C debe seguir un camino cuadrado a medida que la forma rota dentro del cuadrado.
Otra aplicación común de estas formas ocurre como parte de una leva. Debido a que las formas rotan dentro de un cuadrado, mantienen contacto con ambos lados del seguidor de la leva sin necesidad de un resorte.
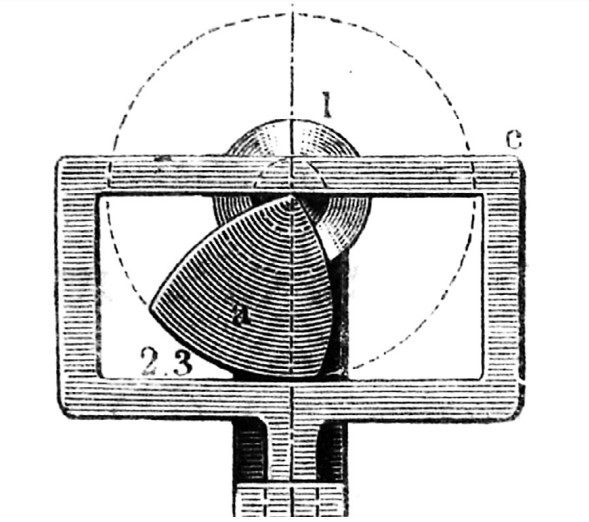
Figura 7: Una leva que incorpora el mecanismo de Reuleaux.
Un ejemplo de leva, tomado del famoso libro de Reuleaux (1876), se muestra en la Figura 7. A medida que la leva rota alrededor del punto en el centro del círculo discontinuo, el seguidor rectangular se mueve verticalmente. Durante parte del tiempo, la caja rectangular permanece estacionaria, y esta parte del movimiento a menudo se conoce como ‘dwell’. Esto es particularmente útil en mecanismos como prensas de impresión, donde una parte de la máquina debe mantenerse en una posición fija durante un tiempo específico.

Figura 8: Un modelo que muestra la geometría esencial de un motor rotativo.
El rotor de Reuleaux también se usa en el diseño del motor rotativo de automóviles. Mientras que un motor tradicional usa un pistón que se mueve de manera recíproca, un motor rotativo genera rotación directamente. En este diseño, el rotor de Reuleaux rueda alrededor de un engranaje interno circular y sus esquinas trazan la forma que se muestra en la Figura 8.
Existen muchas otras parejas de formas que pueden usarse de esta manera. Las bombas y los motores son, en cierto sentido, la inversa uno del otro. Por lo tanto, no es sorprendente que esta geometría encuentre aplicaciones en ambos casos. Dos ejemplos de ello se muestran en la Figura 9.
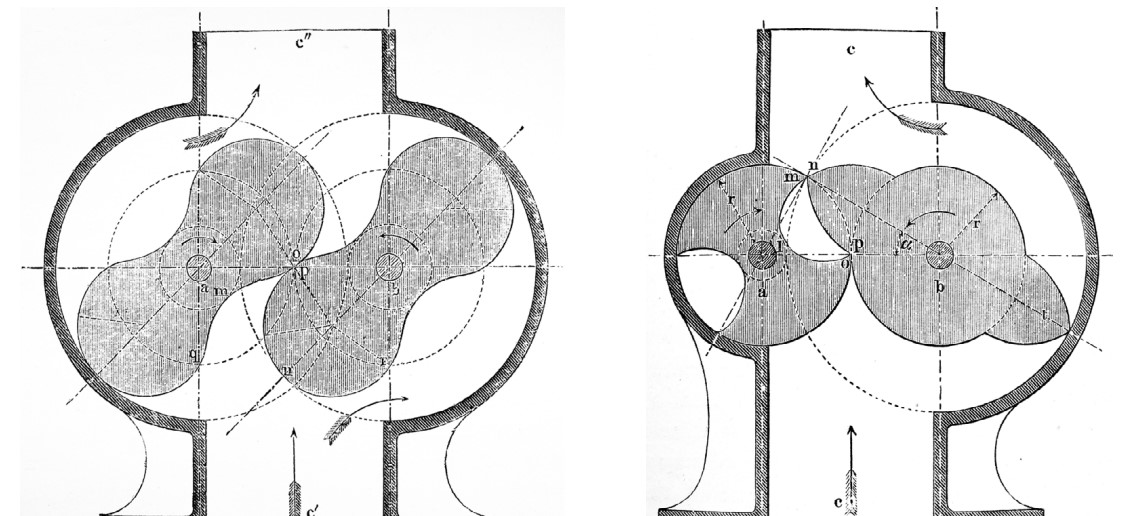
Figura 9: Bombas que incorporan formas que rotan en pares.
A la izquierda se muestra un soplador Roots, comúnmente utilizado para mover grandes volúmenes de aire a bajas presiones. A la derecha, se muestra una bomba diseñada por Evard. Desde formas como estas, es solo un pequeño paso hacia los engranajes, que también rotan en pares, tocándose y transmitiendo fuerza.
El libro de Reuleaux (1876) examinó y catalogó una gran variedad de bombas y motores, así como todo tipo de pares de formas que se mueven juntas. Los rotores para otros polígonos regulares (Goldberg, 1960) también tienen aplicaciones en estos campos.
Estándares para la evaluación de la redondez
Hemos visto ejemplos que ilustran por qué tener un ancho constante no es suficiente para garantizar que una forma sea un círculo. Esto aún deja la cuestión práctica de qué podemos medir para decidir si una forma es redonda y para cuantificar cualquier desviación de la redondez.
Medir el ancho se basa en dos puntos de contacto. Sin embargo, un círculo se define de manera única por tres puntos de contacto. Es decir, a través de cualquier conjunto de tres puntos existe un único círculo. Aquí tomamos una pequeña licencia al definir una línea recta como un círculo de radio infinito. ¿Podemos crear una prueba efectiva basada en tres puntos de contacto en lugar de dos?
Imagina un círculo descansando en un bloque sólido en forma de V, como se muestra en la Figura 10. El ángulo interno es α y, por simetría, la parte superior del círculo se ubicará en la bisectriz del ángulo formado por las dos caras del bloque en V. Ahora, imagina un dispositivo de medición utilizado a lo largo de esta línea. Si un círculo gira dentro del bloque, entonces la posición del dispositivo de medición permanece constante.
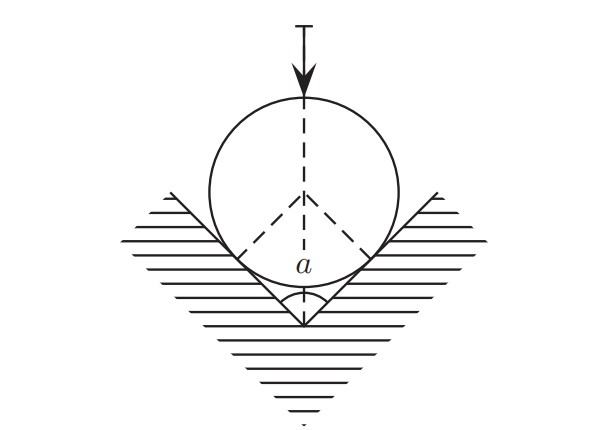
Figura 10: Un bloque en V utilizado para pruebas de redondez.
¿Podemos concluir lo contrario? Es decir, si una forma rota suavemente dentro de un bloque en V y la posición del dispositivo de medición no cambia, ¿significa esto que la forma es un círculo?
Figura 10: Un círculo en un bloque en V.
Si la posición del dispositivo de medición permanece constante, ¿es la forma realmente redonda?
Esto es exactamente lo que se propone en la parte 3 del Estándar Británico para la Evaluación de Desviaciones de la Redondez, BS 3730 (British Standards Institution, 1987), que define los "Métodos para determinar desviaciones de la redondez utilizando medición de dos y tres puntos".
Ahora bien, probar la anchura es algo completamente razonable. Si la anchura varía, entonces la forma no es redonda, y la medición de la anchura es económica y precisa. Sin embargo, por sí sola no es suficiente, como hemos visto. La medición de tres puntos parece una mejora, pero ¿estamos a punto de cometer el mismo error lógico? Un círculo rota suavemente dentro del bloque en V, pero si una forma rota suavemente, ¿es necesariamente un círculo?
La fiabilidad de la prueba depende de la respuesta a esta pregunta. Si podemos construir formas no circulares mediante geometría pura que sean indistinguibles de un círculo perfecto bajo condiciones de prueba con un bloque en V, entonces habremos engañado a la prueba.
Imagina que podemos construir formas geométricas que, al rotar dentro de un triángulo de tamaño fijo, permanecen en contacto con los tres lados. A estas formas se les llama rotores del triángulo. Es importante reconocer una diferencia sutil entre la prueba propuesta en la Figura 10 y una forma que rota dentro de un triángulo.
Un rotor de triángulo mide las distancias relativas entre tres líneas tangentes. La Figura 10 muestra dos líneas tangentes fijas y medimos encontrando los puntos en la curva que se ubican en la bisectriz del ángulo entre estas líneas tangentes. No sabemos nada específico sobre la dirección de la línea tangente en ese punto. La prueba mostrada en la Figura 11 utiliza un pequeño círculo como punto de contacto, lo cual es un enfoque diferente.
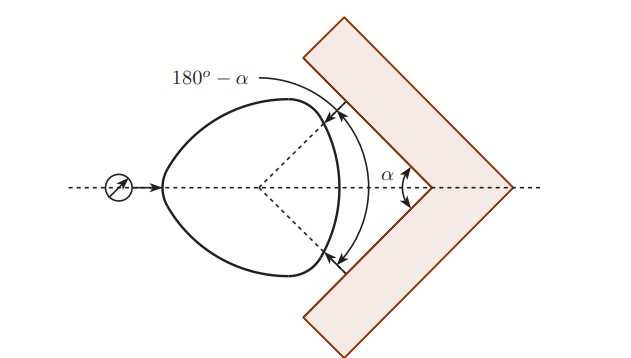
Figura 11: El método simétrico de cumbre del Estándar Británico.
Es importante notar que el punto de contacto en la Figura 11 no es generalmente el mismo que en la Figura 10. Estas son diferencias muy sutiles, pero que no se reconocen en aplicaciones como las propuestas por Goho, Kimiyuki y Hayashi (1999). A pesar de estas sutilezas, si podemos encontrar una forma que rote dentro de un triángulo, entonces se plantea una seria duda sobre la eficacia de las pruebas estándar para la evaluación de la redondez utilizando bloques en V.
Rotores de un triángulo
Cada triángulo tiene un círculo que puede rotar en su interior. Este es llamado el círculo inscrito y puede encontrarse mediante geometría pura. El centro del círculo inscrito debe ubicarse en la bisectriz del ángulo entre un par de lados. De hecho, todas las bisectrices de los ángulos se encuentran en un punto llamado incentro, que se muestra en la Figura 12.
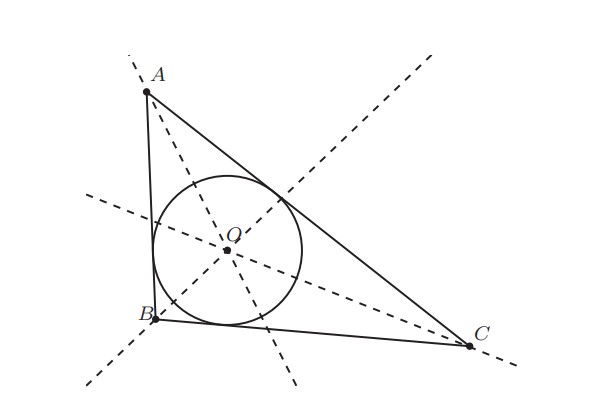
Figura 12: El círculo inscrito de un triángulo.
La pregunta fundamental que nos interesa es: ¿para qué triángulos podemos encontrar formas no circulares que roten dentro del triángulo? ¿Podemos caracterizar todas esas formas y cuáles son sus propiedades?
Para abordar esto, tomamos una familia de líneas. La región encerrada por esta familia es conocida como la envolvente. Esta es una forma natural de definir nuestras formas, ya que se crean mediante líneas tangentes, y es precisamente la propiedad de las tangentes lo que necesitamos: rotar dentro de un triángulo específico se trata de mantener las líneas tangentes en una configuración particular.
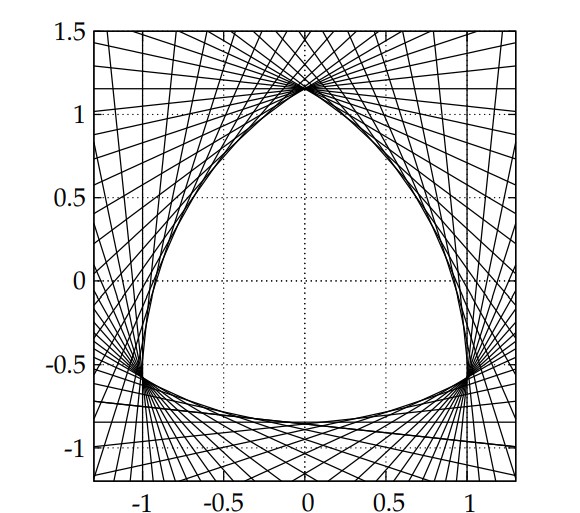
Figura 13: El rotor de Reuleaux definido por una envolvente de líneas.
Una envolvente de líneas puede transformarse en una ecuación paramétrica para la curva utilizando cálculo. La siguiente ecuación paramétrica:
\[ x(t) = -\sin(t) + \frac{\sin(4t)}{8} + \frac{\sin(6t)}{12} \\\] \[y(t) = \cos(t) - \frac{\cos(4t)}{8} - \frac{\cos(6t)}{12} \]
se grafica en la Figura 14. Esta forma tiene ancho constante y, por lo tanto, es un rotor de un cuadrado y también rota dentro de un triángulo equilátero.
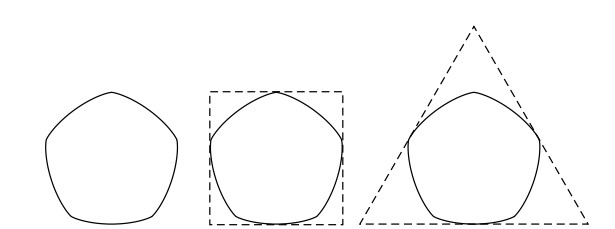
Figura 14: Un rotor tanto del cuadrado como del triángulo equilátero.
Los tres ángulos dentro de un triángulo definen de manera única la forma, pero no su tamaño. Para responder de manera precisa a nuestra pregunta, debemos considerar cómo medir los ángulos. Una rotación completa tiene 360 grados (aunque en matemáticas la unidad alternativa de radianes es comúnmente utilizada: \(1 \text{ radian} = \frac{180}{\pi}\)).
Un concepto importante es el de los números racionales. Un número real \(x\) es racional si existen enteros \(p\) y \(q\) tales que \(x = \frac{p}{q}\). En matemáticas, la distinción entre números racionales e irracionales es fundamental; por ejemplo, \(\frac{1}{2}\) es claramente racional, pero \(\sqrt{2}\) es irracional.
Teorema 5.1: Un triángulo tiene un rotor no circular si y solo si todos sus ángulos son racionales.
Esto se demuestra en Bryant y Sangwin (2008), con la investigación subyacente y los detalles completos en Sangwin (2009). La mayor desviación posible de la redondez de un rotor puede cuantificarse tomando el mínimo común múltiplo \(n\) de los denominadores de los tres ángulos (expresados como fracciones de una rotación). La desviación máxima de la redondez es aproximadamente \(\frac{1}{n^2}\), lo que significa que cuanto mayor sea el denominador de la fracción, menor será la desviación de la redondez.
Tener únicamente ángulos de 60° (es decir, \(\frac{1}{6}\) de una rotación) genera la mayor desviación posible de la redondez, ya que el denominador mínimo es 6. En contraste, el procedimiento de prueba propuesto por Goho et al. (1999) utilizó ángulos como \(\frac{113}{360}\). Tener un denominador grande, como 360, es una elección práctica muy sensata.
Con este análisis, podemos reconsiderar el procedimiento estándar de prueba BS 3730 (British Standards Institution, 1987), el cual utiliza ángulos particularmente convenientes dentro de los triángulos, lo que puede resultar en formas con desviaciones potencialmente mayores de la redondez.
Sin embargo, no todo está perdido; existen formas que pueden rotar dentro de triángulos con ángulos racionales. Usar múltiples bloques en V con ángulos cuyos denominadores sean primos entre sí reduce radicalmente la posibilidad de que la prueba sea engañada. De hecho, el error teórico máximo se reduce rápidamente por debajo de un límite práctico, lo que restaura la utilidad de la prueba.
Dicho esto, no está completamente claro si los autores del estándar apreciaron esta matemática. Si lo hubieran hecho, es muy probable que hubieran tomado decisiones bastante diferentes con respecto a los ángulos especificados para ser usados en los bloques en V estándar.
Conclusión
Los estándares de medición son esenciales para la ciencia y la ingeniería. Desafortunadamente, la geometría descrita en este artículo muestra por qué evaluar la redondez no es simplemente una cuestión de establecer un ancho constante. Aunque gran parte de esta geometría se ha conocido durante cientos de años, no apreciar sus implicaciones puede tener consecuencias desastrosas, e incluso fatales.
De manera intrigante, las pruebas estándar, o las variaciones más comúnmente implementadas, aún pueden ser ‘engañadas’ por formas que rotan dentro de un triángulo. Sin embargo, al comprender la diferencia entre números racionales e irracionales, podemos mejorar drásticamente este procedimiento de prueba simple.
Agradecimientos
Las Figuras 4, 5, 8, 10 y 13 han sido reproducidas de How Round is Your Circle? (Bryant y Sangwin, 2008) con permiso de Princeton University Press.
Referencias
Bryant, J. y Sangwin, C. J. (2008) How Round is Your Circle? Where Engineering and Mathematics Meet. Princeton, NJ: Princeton University Press.
British Standards Institution (1987) BS 3730: Assessment of Departures from Roundness. Londres: British Standards Institution.
Chakerian, G. D. y Groemer, H. (1983) Convex bodies of constant width. En Convexity and its Applications, ed. Gruber, P. M. y Wills, J. M. pp. 49–96. Boston: Birkhauser.
Cundy, H. M. y Rollet, A. P. (1961) Mathematical Models. Oxford: Oxford University Press.
Feynman, R. P. (1989) “What Do You Care What Other People Think?”: Further Adventures of a Curious Character. Londres: Unwin Hyman.
Goho, K., Kimiyuki, M. y Hayashi, A. (1999) Development of a roundness profile measurement system for parallel rollers based on a v-block method. International Journal of the Japanese Society of Mechanical Engineers, C42(2), 410–415.
Goldberg, M. (1960) Rotors in polygons and polyhedra. Mathematics of Computation, 14(71), 229–239.
Kearsley, M. J. (1952) Curves of constant diameter. The Mathematical Gazette, 36(317), 176–179.
Reuleaux, F. (1876) The Kinematics of Machinery: Outlines of a Theory of Machines. Londres: Macmillan.
Rogers, W. P. (1986) Report of the Presidential Commission on the Space Shuttle Challenger Accident. Washington DC: United States Government Printing Office. Disponible en: science.ksc.nasa.gov.
Sangwin, C. J. (2009) Deceiving the v-block method for assessment of departure from roundness. International Journal of Computational Geometry and Applications, 19(6), 521–532.
¿Dónde puedo conseguir algunas de estas formas?
El libro clásico sobre modelos matemáticos prácticos de Cundy y Rollet (1961) comienza diciendo que "el principal uso de un modelo es el placer derivado de hacerlo". Las formas de ancho constante pueden fabricarse fácilmente con cartón, madera contrachapada y otros materiales básicos, y dos de ellas pueden sujetarse juntas para hacer rodillos. Las formas sólidas son excelentes proyectos para impresión 3D.
Las formas sólidas de plástico y las figuras bidimensionales de ancho constante pueden adquirirse en Maths Gear: mathsgear.co.uk.
Las formas metálicas de ancho constante pueden comprarse en Grand Illusions: www.grand-illusions.com.
Ambos sitios también tienen una variedad de otros juguetes y curiosidades matemáticas muy interesantes. Cabe señalar que las empresas mencionadas aquí son independientes tanto del autor como del editor.
Chris Sangwin es Profesor Titular en Educación Matemática en el Centro de Educación Matemática de la Universidad de Loughborough. De 2000 a 2011, estuvo adscrito a tiempo parcial a la ‘Maths Stats and OR Network’ de la UK Higher Education Academy para promover el aprendizaje y la enseñanza de las matemáticas universitarias.
En 2006, recibió una Beca Nacional de Enseñanza. Sus intereses en aprendizaje y enseñanza incluyen (i) la evaluación automática de matemáticas mediante álgebra computacional, en particular el desarrollo del sistema STACK, y (ii) la resolución de problemas utilizando el método Moore y enfoques similares centrados en el estudiante.
Es autor de varios libros, incluyendo How Round is Your Circle, que ilustra e investiga muchos vínculos entre matemáticas e ingeniería utilizando modelos físicos.
Email: C.J.Sangwin@lboro.ac.uk